En una entrada anterior comente como trabaja el software de PanoramicCam, pueden encontrarlo aquí.
En este punto me quiero enfocar un poco sobre el hardware utilizado, el cual fue auspiciado por DigitSpace, los links de cada uno de los componentes están debajo:
- ESP32-CAM
- Motor paso a paso 288yj-48 y el driver
- PCB experimental
- Headers
- condensador electrolítico, utilice el que tenia a mano.
Comencé cortando una pieza de pcb ligeramente superior al tamaño del ESP32-CAM:

Utilice el soporte impreso para marcar donde irían los agujeros para sujetar el pcb al soporte; cuidado al performar, el pcb puede quebrarse.
Luego posicionamos el ESP32-CAM junto con los headers y lo soldamos en la posición, de manera que quede de la siguiente manera:

Debemos soldar 6 cables sobre el ESP32-CAM; dos son la alimentación que van a 5V y GND, y los cuatro restantes es la comunicación con el ULN2003, van soldados a
GPIO 12,13,15 y 14.
Se utiliza el siguiente esquema de conexiones:
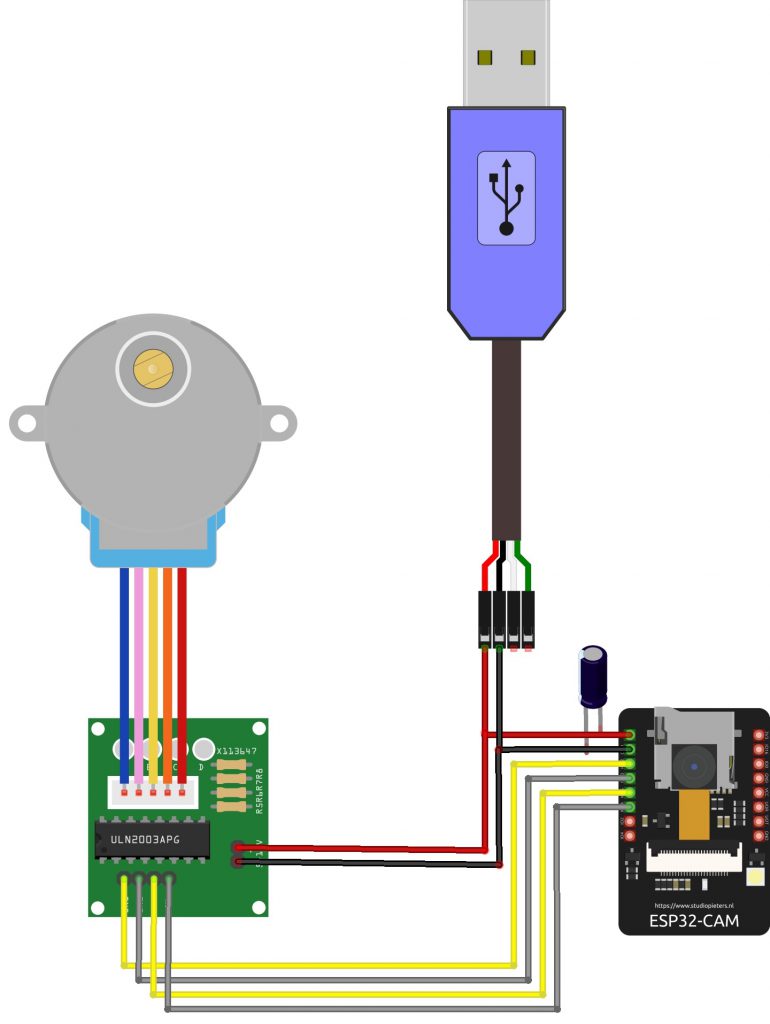
Noten que en la alimentación del ESP32-CAM utilice un condensador, usualmente no lo requiere y funciona correctamente, pero ayudo mucho a prevenir brownout. En mi caso utilice un condensador electrolítico, que era lo que tenia disponible en el momento.
Una vez soldados los cables, podemos comenzar a montar la base del soporte;

El soporte impreso tiene una mueca donde entra el breakout usb, antes de pegarlo a la base, es necesario soldar cuatro cables, dos para los 5V, en mi caso utilice dos tipos de conectores diferentes: uno para conectar la alimentación del ESP32-CAM y otro para conectar el ULN2003.
El pcb del ULN2003 lo atornille al soporte, aunque podría ir simplemente pegado. Si lo pegan tengan cuidado de no aplicar mucho pegamento derretido junto, el calor puede deformar el soporte.
El motor paso a paso va montado sobre el soporte con dos tornillos y tuercas; las tuercas las puse en la parte interior de manera que se sujeten contra el mismo motor y sea sencillo de ajustar.

El soporte impreso no tiene 100% la coincidencia de donde van los tornillos, los volvi a hacer con un taladro y quedo bien. Decidi que el STL no tenga las perforaciones de los tornillos sino que cada uno las haga por su cuenta, de esa manera permite reemplazar el motor por otro.
El link de thingiverse para descargar los modelos es el siguiente:
https://www.thingiverse.com/thing:4270344
El pcb donde tenemos el ESP32-CAM va montado sobre el soporte vertical utilizando un precinto; en mi caso no tenia ningún tornillo de ese diámetro y también previene de sumar mas peso al cabezal.

También utilice un precinto para mantener juntos los cables.
Es importante pasarlos por el orificio del soporte impreso antes de soldar los conectores. Luego sera imposible.
Luego solo resta poner los conectores a los cables, en mi caso emplee de diferente color y los agrupe por bobina con una cinta:

De esta manera tenemos para la bobina 1 en IN1 y IN2 y para la bobina 2 en IN3 y IN4.
Por ultimo debemos organizar un poco los cables y colocar la tapa inferior con dos tornillos.